Back in April, as a birthday present to myself, I received a BITX40, an inexpensive 40-metre band SSB transceiver, designed by the brilliant radio amateur from India VU2ESE Ashhar Farhan.
Farhan is well-known among amateur radio homebrewers, and the BITX40 board has been purchased by thousands by enthusiasts around the world. It’s been designed specifically to facilitate experimentation, and you can find hacks and mods on the BITX20 discussion group, the Bitx Hacks site and on Github.
The BITX40 comes in a plastic dollar-store box: the bare board and some sockets, potentiometers, a tiny electret microphone, connectors and other hardware, and once the buyer solders these things on, adds 12v battery power– ‘bob’s yer uncle’– you have a working SSB rig. We call it al fresco operating.
But it’s really just a board, and it needs its own home. In keeping with the homebrew ethos of the BITX, users are designing cases and posting them. Bill Meara’s Soldersmoke blog/podcast regularly features BITX40 radios using powder-coated steel mesh, a metal popcorn box, a peppermint bark tin, and even a cakepan. Talk about retro, how homebrew can you get?
However, having a couple of months earlier bought a Prusa i3 Mk2, I thought that I’d like to design and build a 3D printed box for my new BITX.
The BITX40, being a very economical design, lacks many of the extras that grace more commercial rigs, like a signal-strength meter, CAT (remote) control by computer, or even AGC (automatic gain control). Without AGC, you can tune across the dial at weak stations and then all of a sudden be blown out of your chair by a strong station. AGC prevents that, by automatically adjusting the signal stronger or weaker, as required. Not too hot, not too cold. Just right.
So the absence of AGC requires the operator to use both hands: one for the volume control, and the other for tuning. In that sense, it’s a lot like a regenerative radio. And if you’ve read my previous post, I discovered that improper positioning of these controls can eventually get uncomfortable. Because we’re used to the conventional “dials-and-speaker-facing-front” radio case, it’s not something we’re aware of. But once you use a radio where the controls are ergonomically-placed, the experience becomes much more pleasurable.
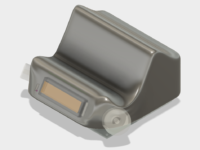
My concept is different from other box designs because it’s ergonomically more efficient–the volume and tuning dials are positioned for ease of use and the speaker is tilted up towards the operator’s head. It’s small and has a much larger heat sink to accommodate 100% duty cycle transmissions that digital modes require. The design for the BITX40 evolved over several weeks; I started just playing around with Fusion 360 without making much headway. I experimented with the Sculpt environment in 360. I found it unwieldy and went back to Modelling. I made a total of 9 false starts before settling on a final design.
BITX40 design 2
BITX40 design 6
BITX40 design 7
BITX40 design 8
BITX40 design 9
BITX40 design 10 v18
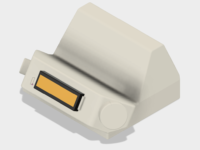
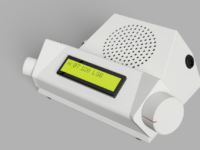
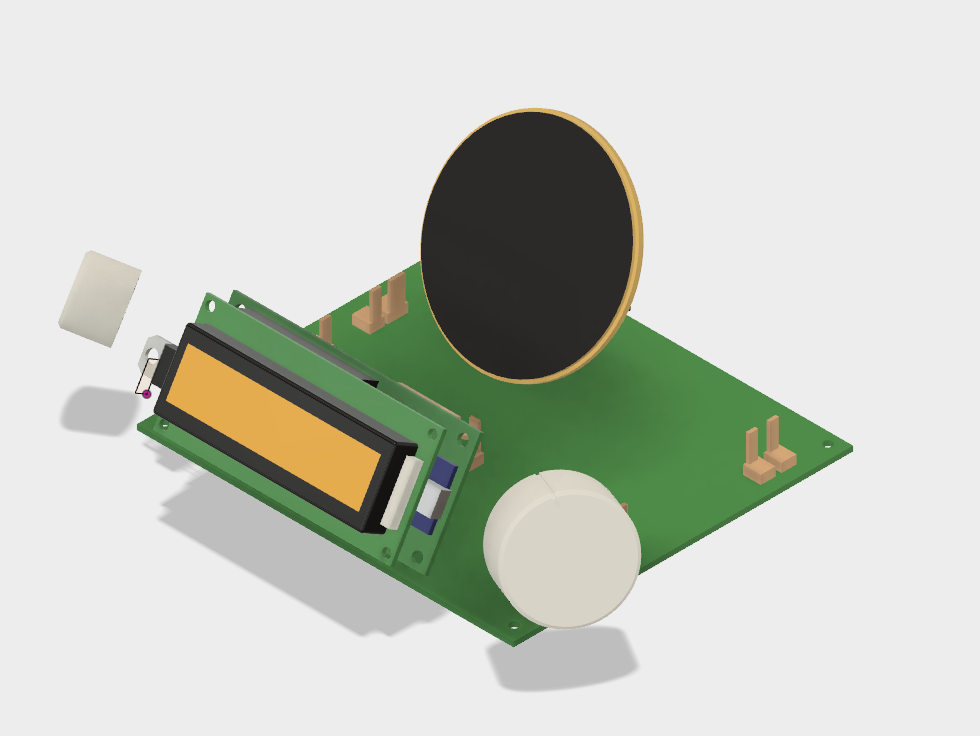
About halfway through this process, I realized that I was designing the shell without taking full account of what needed to go inside. So I modelled facsimiles of the BITX40 board and all the other components, so I created a “starting point” model from which all later models would derive:
BITX40 design start
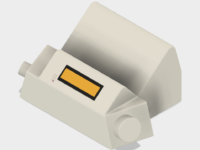
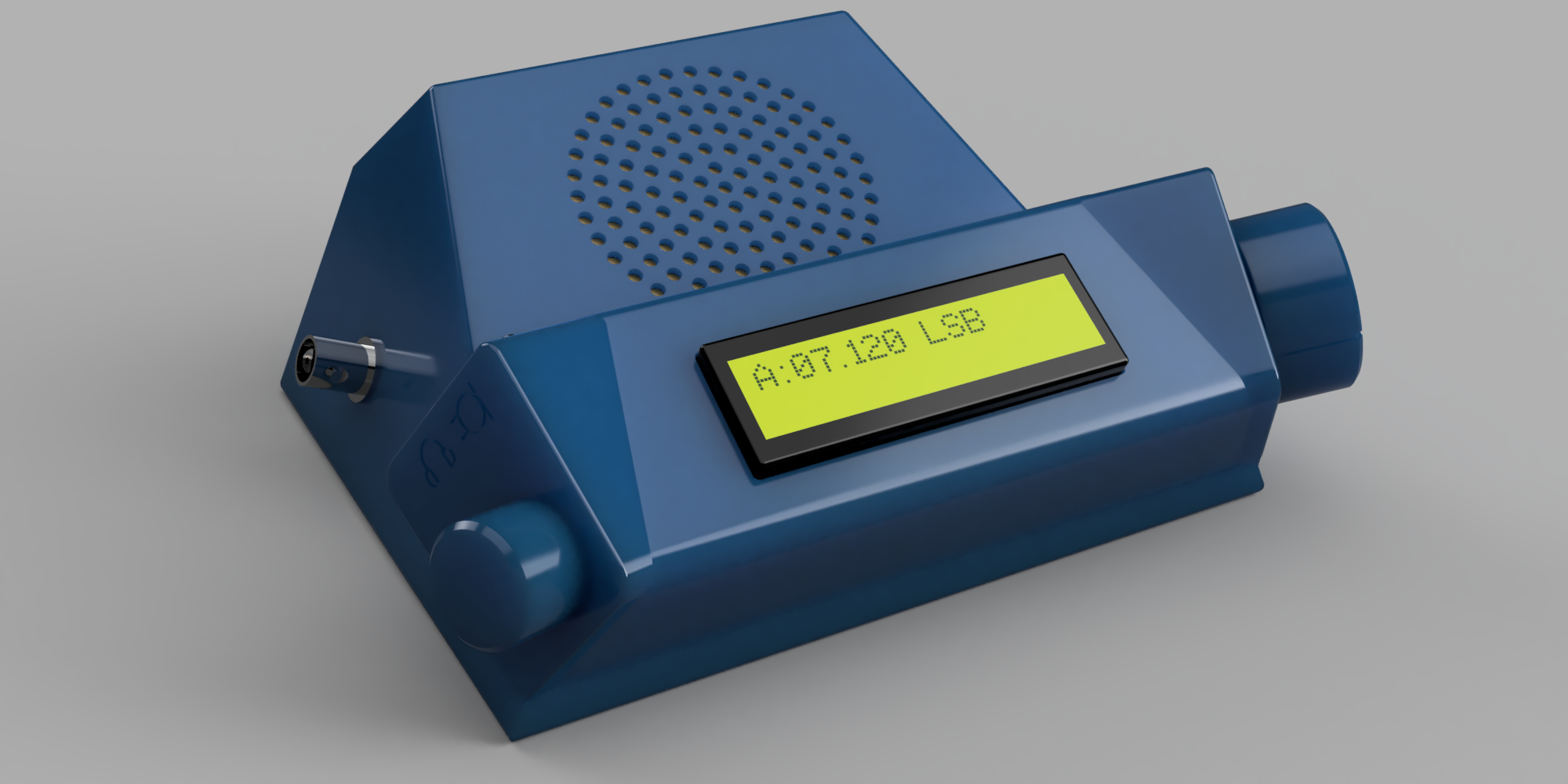
Here’s a final render of the enclosure using a translucent blue, meant to represent a PET filament that I planned to use:
BITX40 Model Render
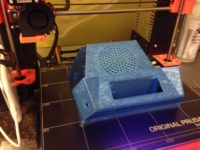
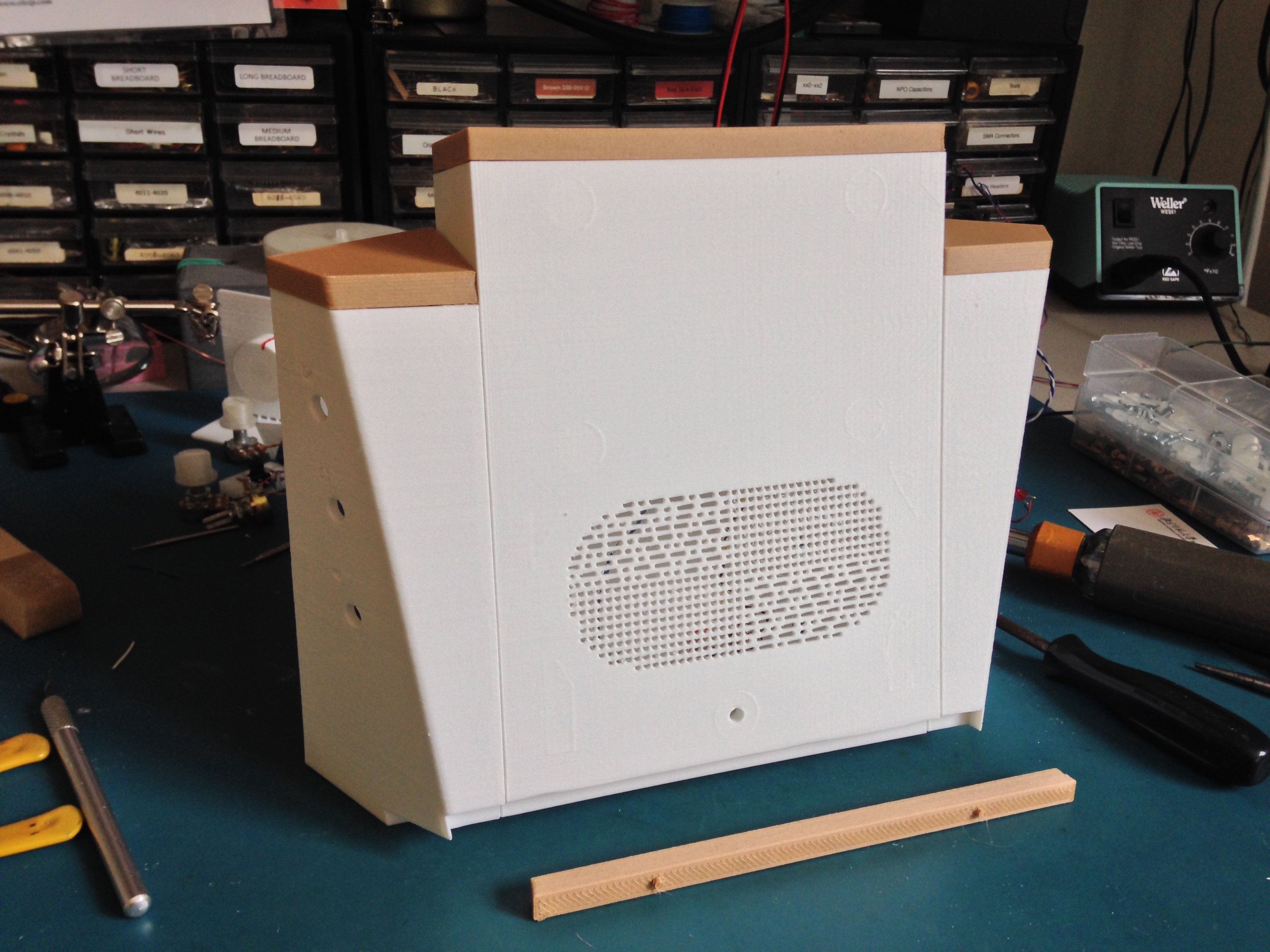
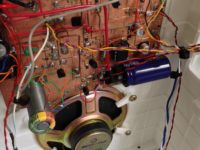
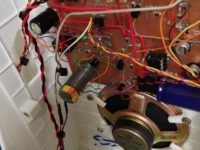
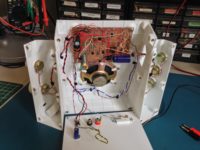
And here are some photos of the actual enclosure during printing, assembly and use:
I’m embarrassed that it’s taken me this long to get this post out. It’s currently nearing the end of August, and I started this project in mid-March. It was really wrapped up in late April, but I had to wait for parts to come from Asia for the enclosure, and they didn’t arrive until June, and then the summer arrived. Oh well.
I benefited from the experience of the first build: I got a good sense of how much space the individual components required, and how to best position the sub-assemblies relative to each other. I had also received my Prusa i3 Mk 2 3D printer with the intention of making boxes for these projects. My thinking evolved from making a presentable box for the radio to thinking about how I actually used the radio, and how to position the controls for most comfort and efficiency.
Here’s my design journal:
March 14, 2017:
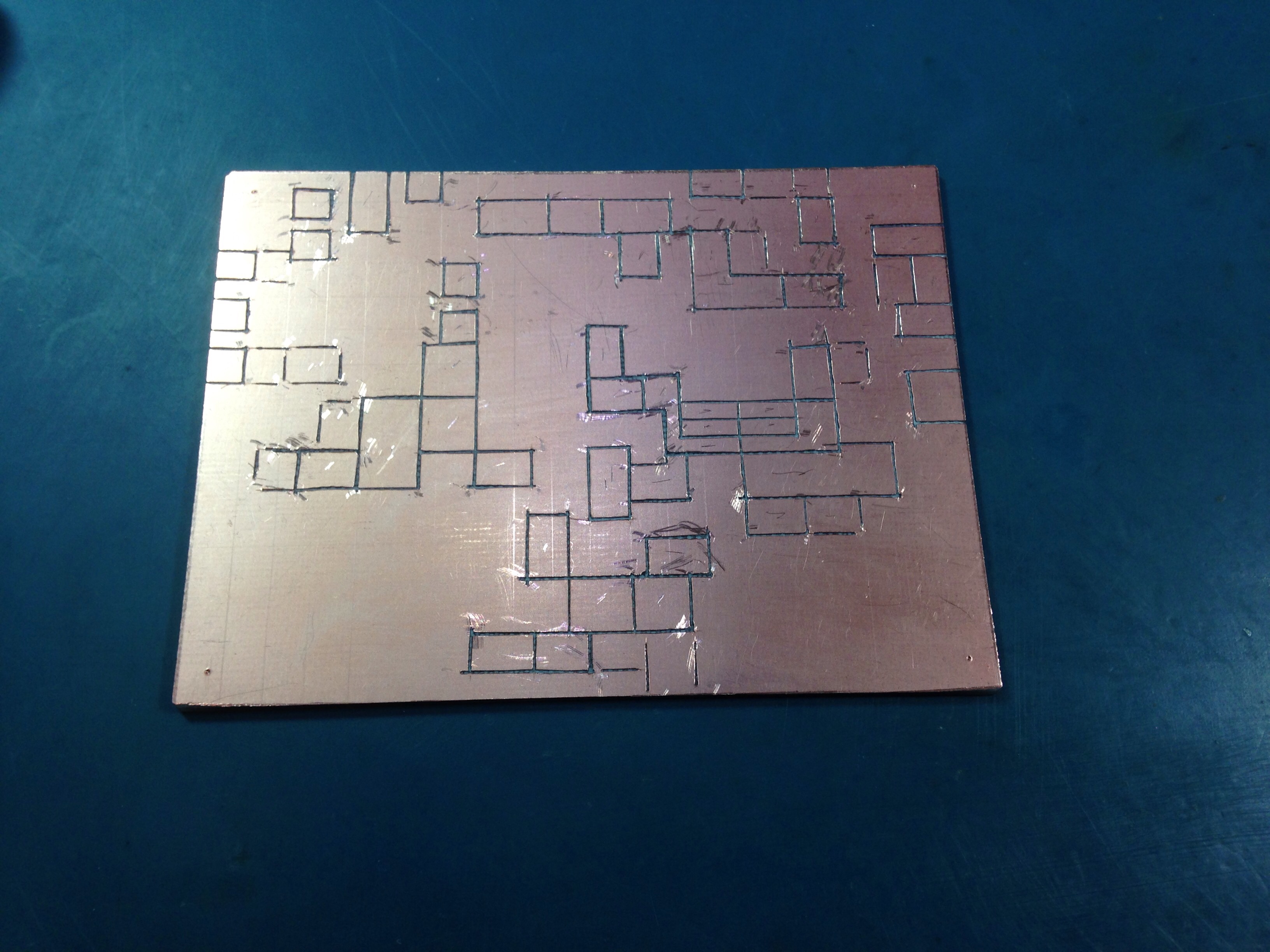
PC board before soldering
This build will use mainly surface mount components on a board which is half the size of the first one. It measures 100x75mm. The islands that I cut in the copper are sized for surface mount resistors and capacitors. Since most of my experimentation was on the first build, I had confidence to concentrate the components. Radios that have closer connections between components are also usually better performers.
March 15:
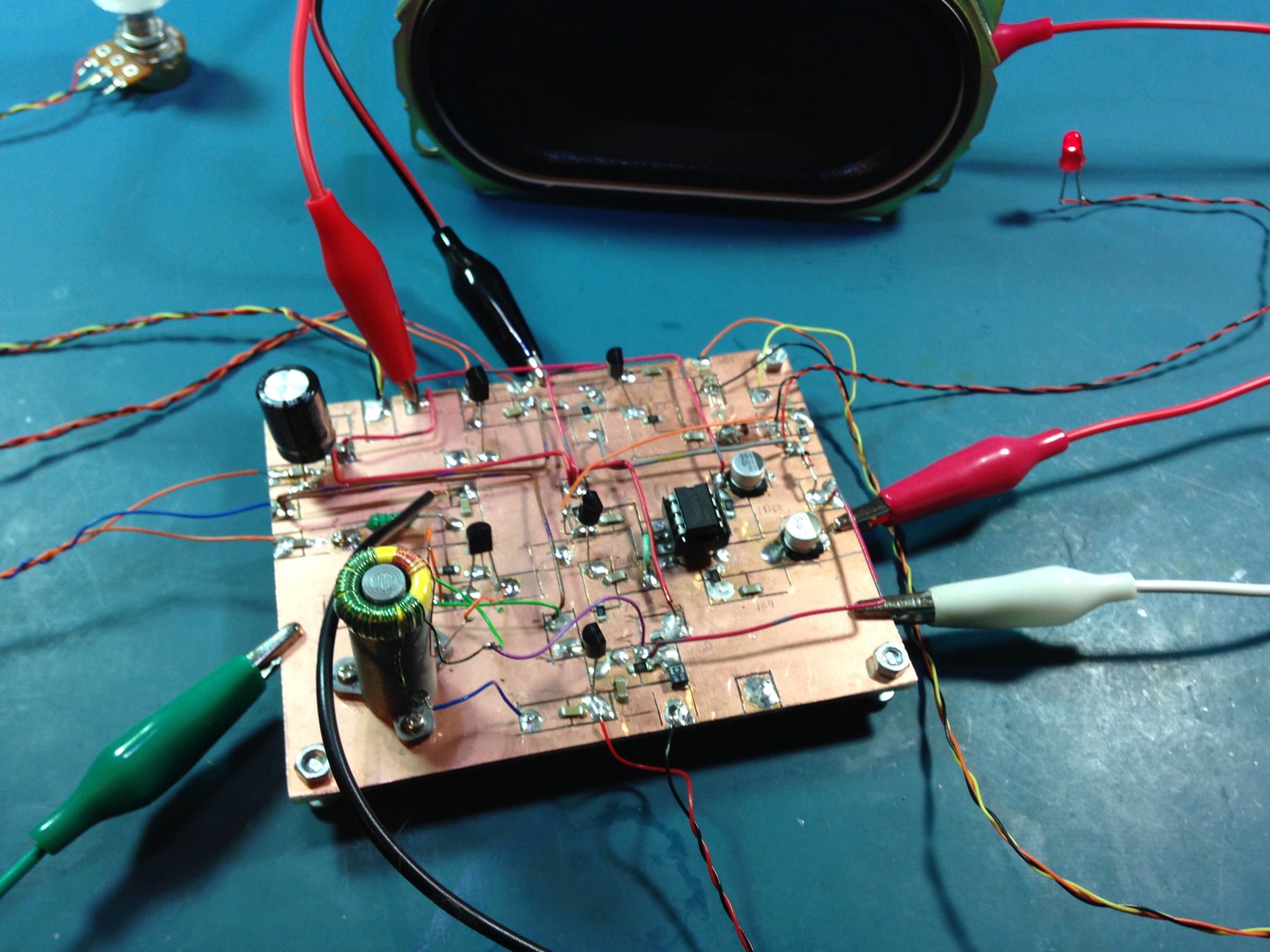
Parts are now soldered on.Now ready for power up. And thankfully, no magic smoke has escaped!
A storm took down the antenna wire attached to the front of the house last night. The hemp string attaching it to the tree gave way. The wire (from a CAT5 cable) is very strong and has lasted two years without breaking. Environment Canada recorded wind gusts up to 109 km/h which is approaching minor hurricane speed. Main vertical antenna in the back yard is unaffected.
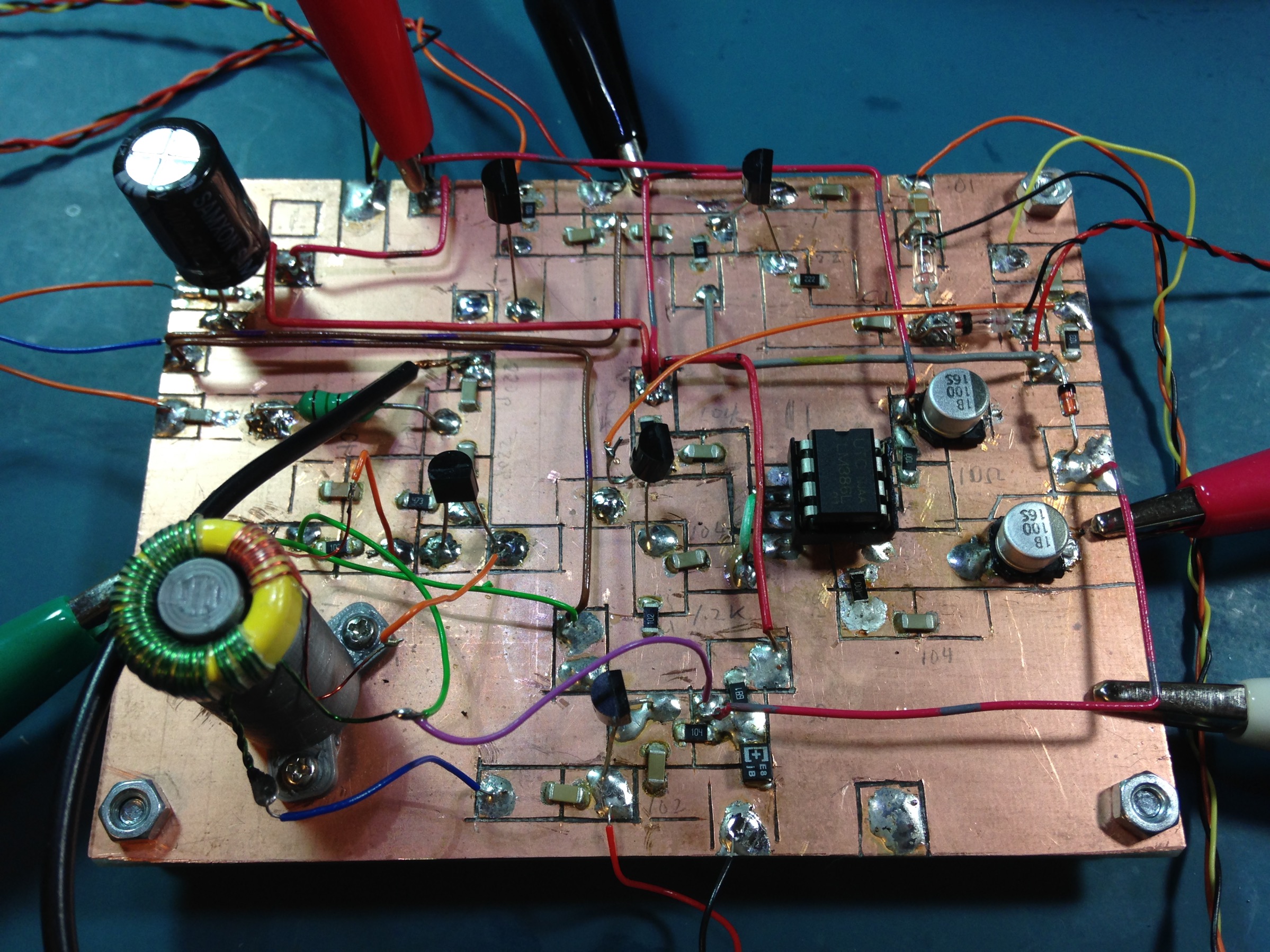
Most of the SMT components are now soldered down.
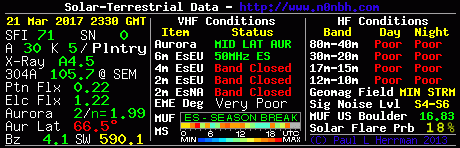
March 21:
Completed most of the components and peripherals. After a couple of minor revisions, this radio now works — even better than the first! Although band conditions are very bad (minor storm and geomagnetic instability), I’m still able to receive a couple of stations over the noise and fading in and out. Fidelity seems much better on this radio.
Reception is Poor Poor Poor Poor Poor Poor Poor Poor
Enclosure
”It’s not just a box!“
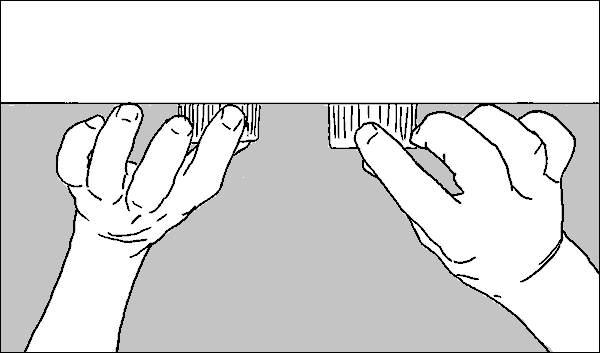
If you’ve ever spent any time in front of a regenerative radio, it doesn’t take long to understand why, despite the excellent sound, dynamic range and overall performance of the design, most radios that work in the medium and high frequency broadcast and shortwave bands are not regens. They’re use different designs that allow the user to tune to a station and then leave it. One big disadvantage of regens is the fact that you have to constantly and carefully adjust the feedback and tuning to get the best reception. There’s a challenge to pulling out a distant signal using one of these radios, and you need two hands to do it.
Position of hands on radio dials, from the frontPosition of hands, from top
That brings up an ergonomic issue: conventional radios are boxes with a speaker and control widgets facing outward from the front. This arrangement serves the average listener reasonably well; the radio is tuned once or twice in an hour and most of the time the listener is not touching the radio at all, so it really doesn’t matter where the controls are.
However, because regenerative radios require constant attention, I found that my hands and arms started getting a little uncomfortable after 15 minutes or so of constant adjustment of the dials. After a few days of using it and thinking about it, I realized that if the controls were on the front, an operator’s hand/wrist/arm had to be contorted into an unnatural and eventually uncomfortable position.
So my next question was “if the radio box resulted in discomfort, what would be more comfortable?” I surmised that if I were able to turn the rotary controls on an angle so that they don’t face directly at the user, but rather faced perpendicular to the user’s forearm, it would result in a more natural control position. I also thought that the front of the radio should be angled upwards slightly, since the radio will be on a desktop: on a ‘box’ radio that is positioned on a desk in front of a user, the speaker is aimed at the listener’s upper chest. The speaker should be pointed directly at the listener’s head, since that’s where her ears are!
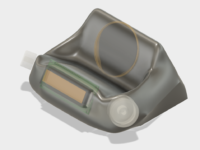
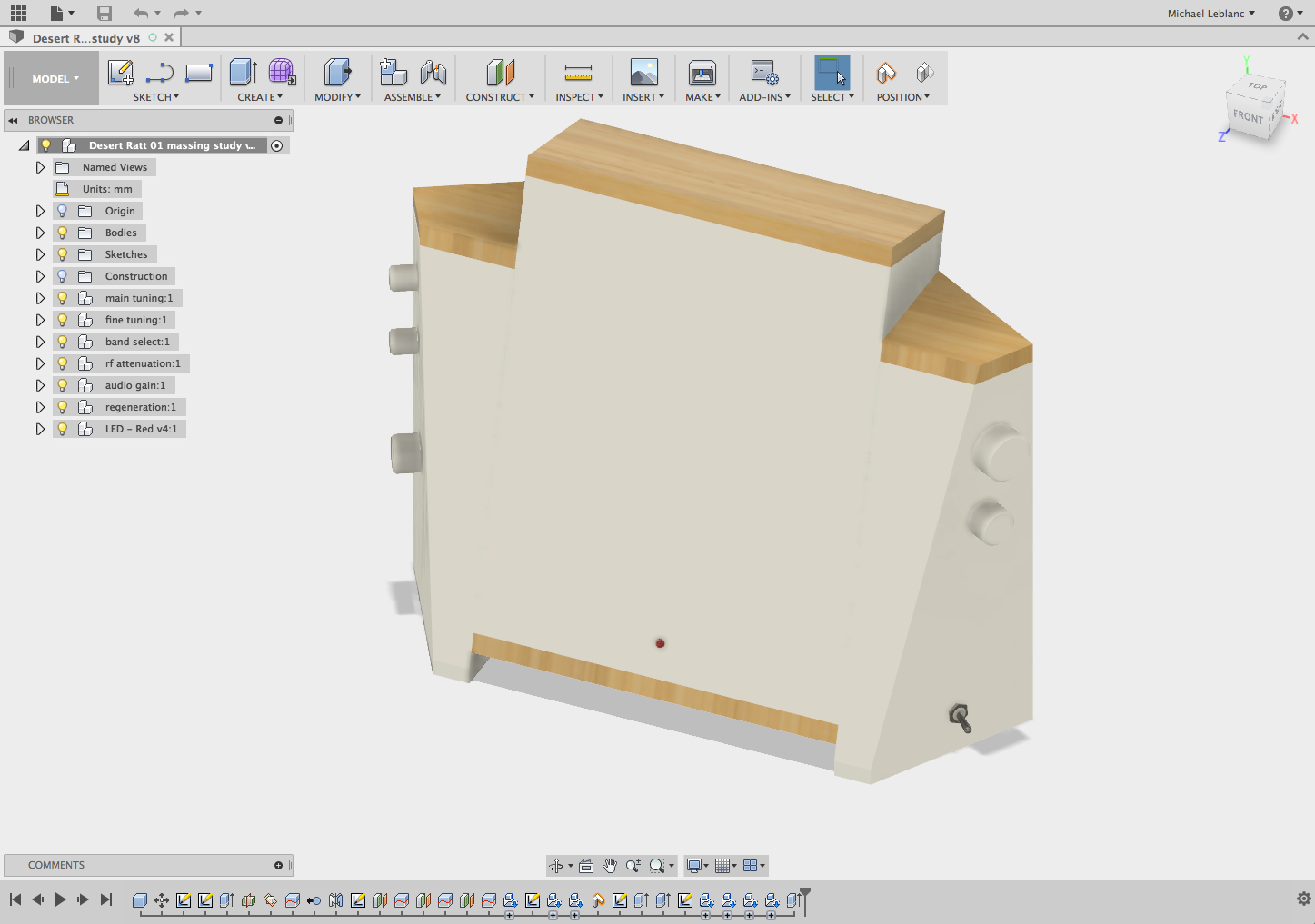
Screen Shot of Design in Fusion 360
Here’s the design as it looked using Fusion 360 in the middle of my development cycle. The design consists of a main centre unit, which holds the circuit board and the speaker, and two side pieces which are bolted to the main cabinet and which hold the user interface items. The enclosure is meant to be entirely 3D printed. The wood too!
Adding a Relay for Band Changing
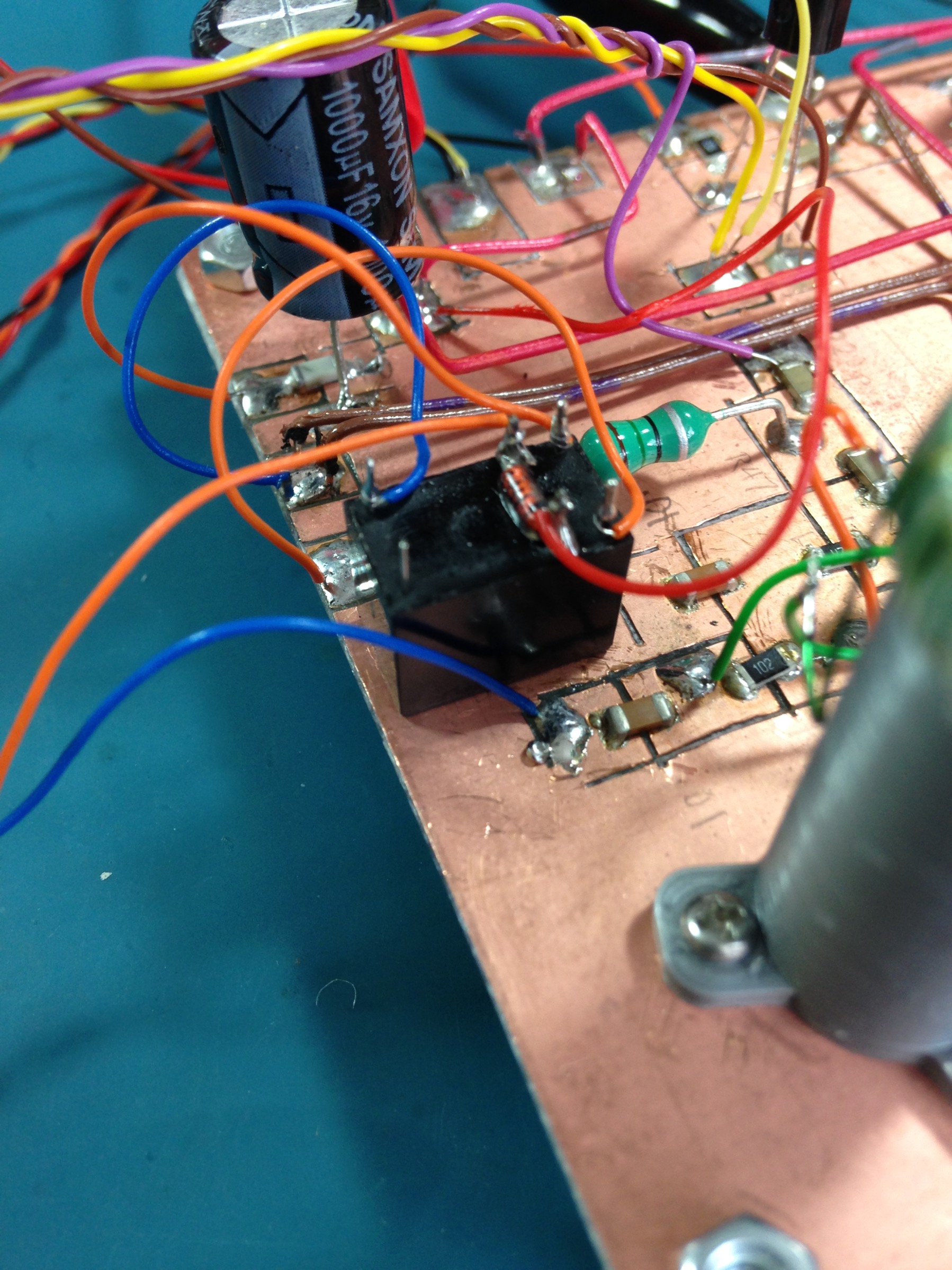
March 23:
Adding a band switch relay (closeup)
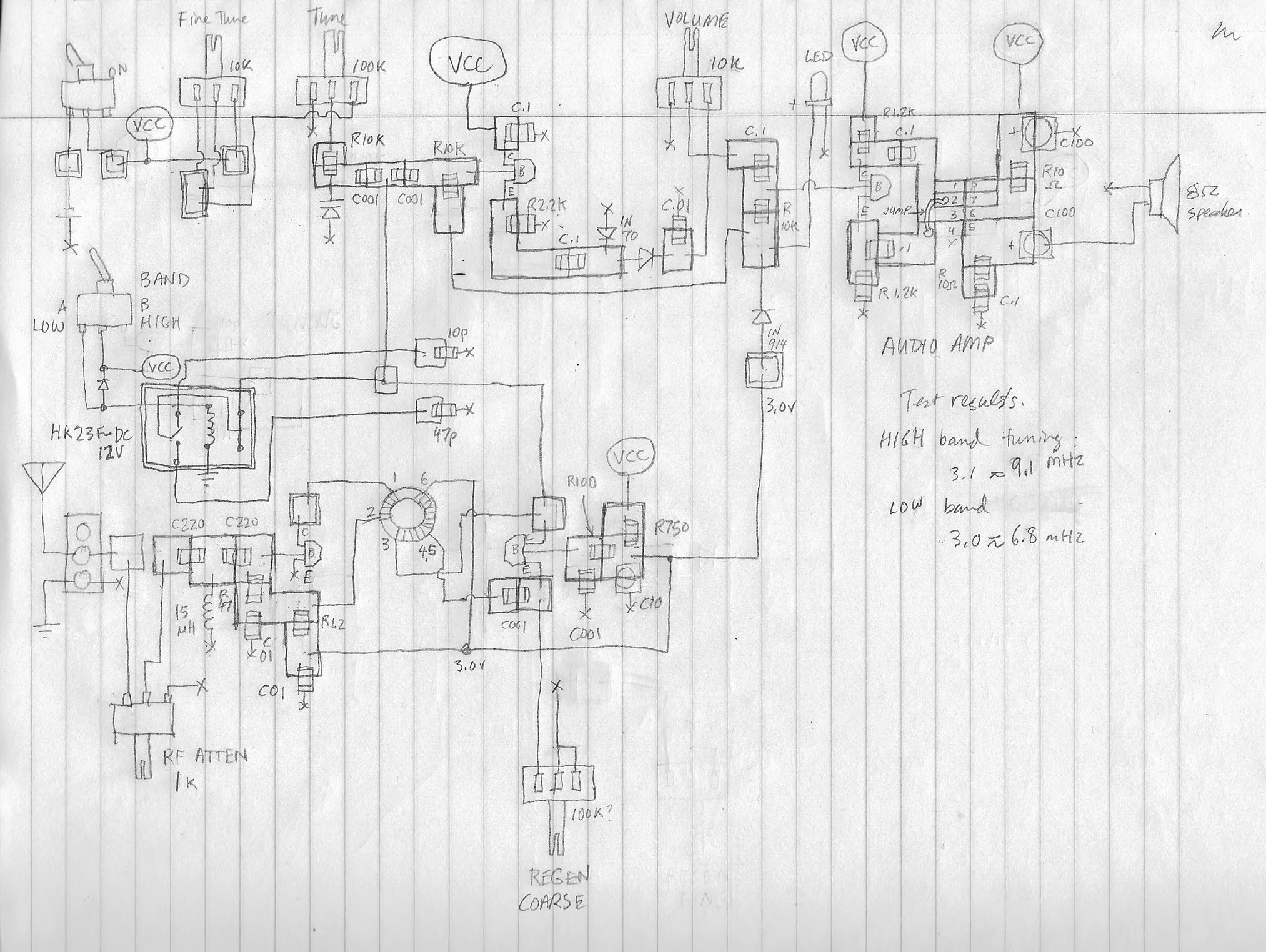
The radio is capable of tuning to two bands: from around 6.5-8MHz and from 9-12MHz. This is done by flipping a toggle switch. The switch itself is some distance from the circuit board, which means that the long wires to and from the switch are likely to adversely affect the circuit. After playing with it al fresco, I made one modification to reduce the length of wire to and from the circuit: I replaced the long leads (20cm) for the band switch with much shorter leads (4cm) to an HK23F-DC12V relay. The relay is actuated by the band switch on the far side of the radio, but the RF signals that are re-routed in the band switch are much shorter. This probably increases Q (makes for sharper tuning) and lowers the total capacitance of the band switch circuit to the values defined by the two small 10pF and 47pF caps.
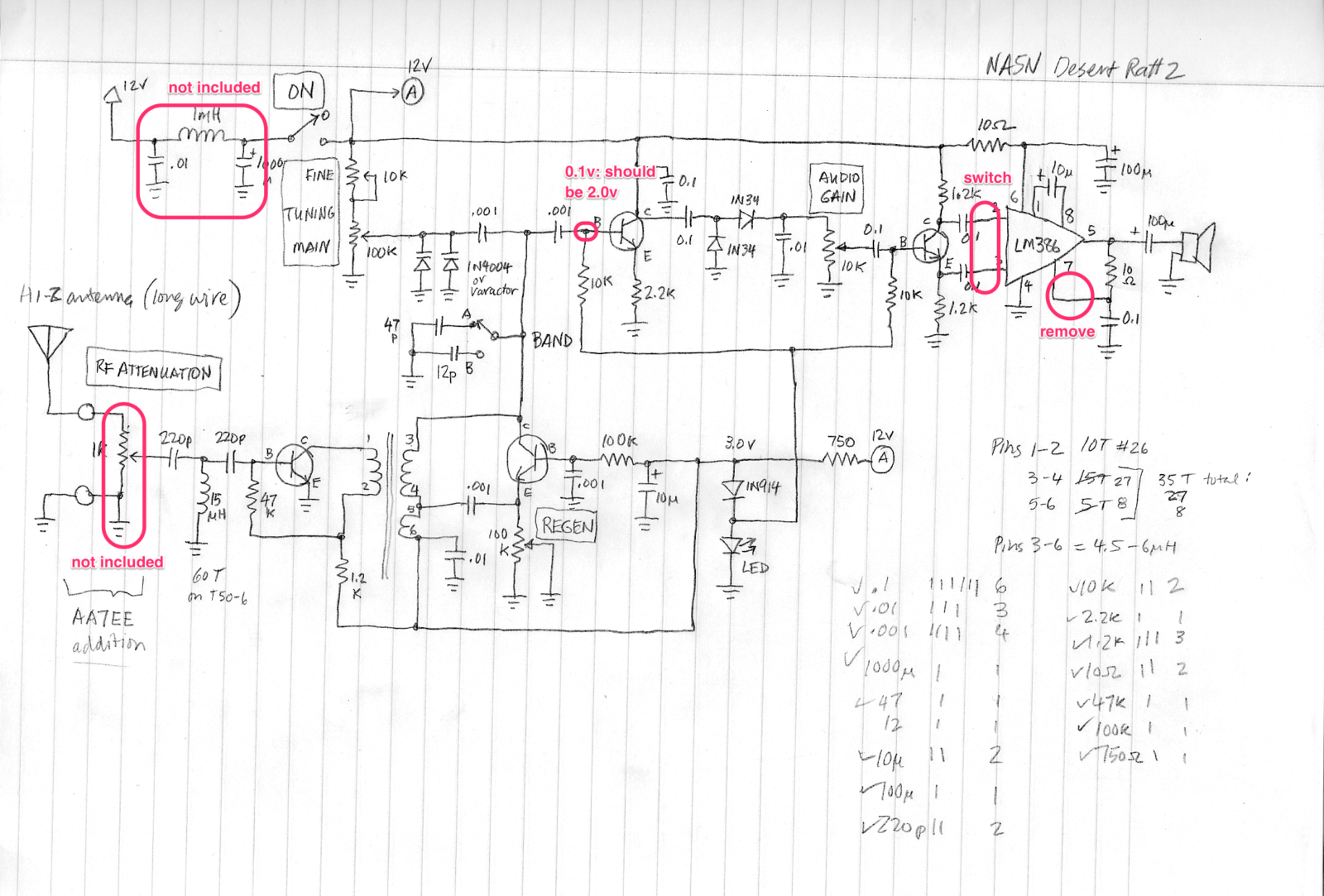
Here’s my final working schematic:
Desert Ratt 2 Final Drawing
Designing the Cabinet for Production
By mid-April, I had printed a draft enclosure to see if it everything would fit together.
No 90° overhangs that are unprintable
Printing in 3D has its own opportunities and limitations. Because it prints up from the bed layer by layer, certain structures such as overhangs longer than about 1cm are not possible without first defining support structures that can be removed after the print is completed. However, careful design can reduce and sometimes even eliminate support material structures. The Prusa i3 Mk2 is capable of printing 45° overhangs. In the case of this enclosure, very few supports were used; if there were overhangs, such as the surfaces that hold the threaded brass inserts, these were extended to between 30 and 40°, as you can see in the detail of this rendering.
Desert Ratt 2, Draft Enclosure April 16:
Centre: need some strengthening fixed
Circuit board: use 2.0 mm holes, 4mm deep, add 1.5mm washers fixed
Band Switch: placement guides not large enough: block is 15 x 31 mm fixed
[Small, medium knobs need at least 5.9 mm dia -they appear to be 5.8mm – is this due to draft mode printing?]
Knobs need to have longer skirts – try 4mm fixed
add dial dots on main tuning fixed
add diode in front of VCC not done.
add headphone jack on back? not done.
swap out pots for new ones fixed
Speaker magnet collides with centre back – replaced
This last point was a surprise; although I thought I had measured everything, even to the point of modelling-in the components, I didn’t model the speaker correctly and the test fit quickly showed that the back panel wouldn’t fit with this large speaker. So it just goes to show: you can have fantastic design software but there’s just no replacement for printing one out and doing a test fit.
Edit: Actually, I printed two full copies in the 0.20 mm “normal” detail setting before printing the final using the 0.15mm “optimal” detail.
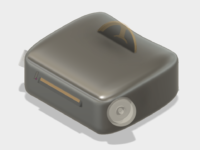
Here’s a Fusion 360 render of the back:
Back view render
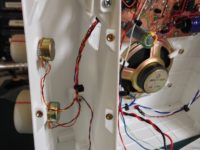
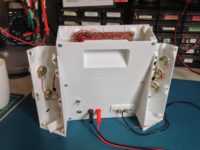
And here are a couple of photos of the actual test fit:
Desert Ratt 2, Draft Enclosure April 18
Centre re-designed with web strengtheners
replaced old grille with Dieter Rams 1973 grille: “steal from the best”
added Dial Dots around the Main Tune pot on the right UI
vertical web strengtheners will not print in Draft mode, printed in normal mode
fashioned clips and mounted new circular speaker
swapped out old potentiometers
stained wood pieces
added “UI clips” on the cable holes to bring the shells closer together
listened in the evening many strong stations… great sound! It’s amazing how much better a speaker can sound when you put it in a box.
Desert Ratt 2, Draft Enclosure April 19
tried listening in morning: unable to tune. Much back and forth. Problem seemed to be located in Regen circuitry & pot. Replaced transistor closest to Regen pot. Finally, replaced the Regen pot. Pot went bad!
bundled cables with nylon ties
urethaned wood
The 3D printed wood pieces were printed from Spool3D “light brown wood” PLA filament. Spool3D is a Canadian company and I buy all my filament from them. My only complaint is that I’ve never been able to get a proper answer from them on what Munsell values they use for their coloured filaments.
Test Fit (front)Test Fit (back)
The wood colour is, as the name suggests, “light brown”, and I was able to stain it (after sanding) with three coats and then lightly give it one coat of urethane. The rest of the cabinet used Spool3D White PLA.
The three sections are screwed together using M3 screws into brass inserts. The inserts are placed on the end of a hot soldering iron, and after about 5 seconds you can press them into place in the plastic and once they cool, they are bonded into the plastic. I found this technique on Youtube.
One last change was the speaker and speaker grille. My initial idea for the grille was to make holes that mimic the dot-dash of morse code. When I transitioned to a smaller round speaker, I stole Dieter Ram’s TP1 record player grille design. In the end I made one final further refinement by making the grille slightly convex.
The final enclosure was printed in “natural” PLA. This was a mistake, because natural PLA is slightly translucent, and I liked the white material better. I resorted to sanding, priming and spray painting the final print—a lot of work that could have been avoided had I printed in white. While PLA is great to print with, it’s difficult to sand and otherwise work with. And because PLA has a melting point of 60° C, I can’t place it in hot environments like a closed-up car in the summer time.
One last observation: it’s amazing how much better a radio sounds when you place the speaker in an enclosure. Or a box.
Here’s a short video of the radio. Unfortunately it was done on an evening with a K index of 4 (unstable geomagnetic conditions). More photos below the video.
Paul Harden NA5N designed the Desert Ratt shortwave regen receiver in the mid-1990’s. It’s a popular radio for builders, and my choice was due to the excellent documentation and the fact that it was designed to tune using varactor diodes, rather than metal fin variable capacitors (that were used in the original Desert Ratt).
Here’s my construction journal:
March 4: Started with the LM386 and the transistor preamp, could not get it to chooch. Reverted to the breadboard. AA7EE has pin 7 unconnected. There’s a principle that you should start with the audio amp and work backwards; this doesn’t work as expected because (as I found out), I needed to bias the base of the transistor on the breadboard before I could get output.
March 6: Soldered a socket and completed the audio amp portion of the circuit. Hoping that it will work as advertised, now that everything is soldered in, once again.
March 7: Completed soldering all components. Result is motorboating. Check AA7EE: he switches pins 2 and 3 on the LM386, which I do, and it’s a relief. However, still no output from the radio. There should be around 2v on the base of the top left transistor, but it’s at ground.
My schematic drawing for the first build of the Desert Ratt 2.
March 8 (morning): Replaced the transistor, no change. Checked voltage again — tried removing various wires implicated in the issue, and found a copper ‘hair’ crossing from the ground plane to an island. Once I removed it, I started to get some fuzz indicating oscillation. Still lots of intermittent noise; soaked the board in alcohol and dried it. This is the last time I’ll cut out islands! There just isn’t enough dependable separation between the islands and the ground plane. Should I start over?
March 8 (afternoon): Popping noise seems to have gone away now that the board has dried fully. And with the evening, I start hearing stations. It chooches!
March 9 (evening): I switch wires for most of the pots as they were wired in backwards (as in loud to the left, quieter to the right). Frequency calibrated after removing a few turns from the main tuning toroid. A is 3.0-6.3 MHz and B is 3.1-7.8 MHz. Very good fidelity and dynamic range. I’m satisfied with this radio’s sound.